3 - Programme utilisant le suiveur de ligne

Le robot est en mode autonome "Téléverser"
|
Rappel de la procédure à suivre pour que le robot mBot fonctionne en mode autonome Cliquez sur "Téléverser" Quand vous aurez fini d'écrire le programme, vous cliquerez sur |
|
Programme suiveur de ligne :
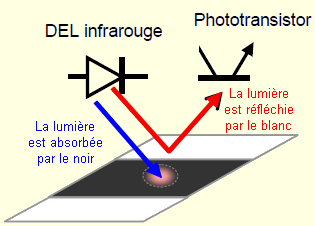
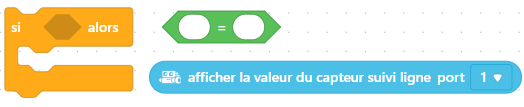
Le robot doit suivre une ligne noire. Si la ligne noire se termine, le robot doit s'arrêter. Le programme devra démarrer lorsqu'on appuie sur le bouton situé sur le dessus du mBot. Instructions à utiliser :
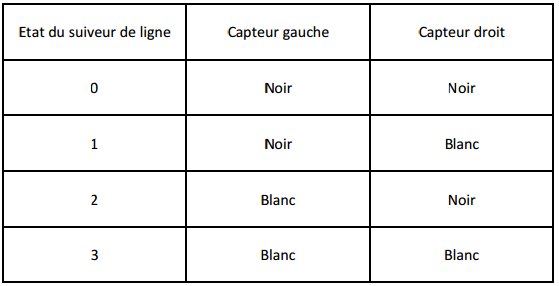
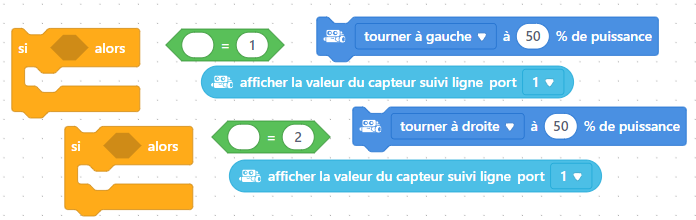
Instructions à utiliser quatre fois (avancer, tourner à droite, tourner à gauche, arrêter) selon la valeur renvoyée par le suiveur de ligne (voir tableau):
|
Créé avec HelpNDoc Personal Edition: Création d'aide CHM, PDF, DOC et HTML d'une même source