2 - Les programmes à réaliser pour la prise en main
1.Le robot est en mode "vivre"
|
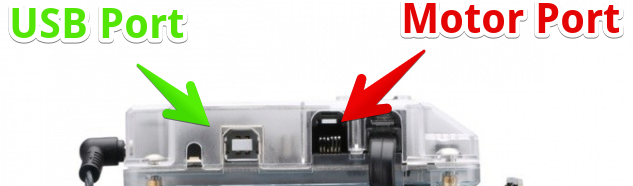
Pour démarrer le logiciel cliquer sur le dossier Sciences et Technologies situé sur le bureau du PC. Ensuite cliquer sur Cliquez sur Utilisez le câble USB pour relier l'ordinateur au robot. Basculer l'interrupteur sur le côté du mBot sur ON Vérifiez que le "mode En direct"est sélectionné Cliquer sur Construisez les programmes ci-dessous et testez les en cliquant sur Appelez le professeur pour faire constater vos résultats. |
|







|
Programme n°1 : Allumer une DEL RGB |
|
|
Créer le programme suivant Méthode Allumer la LED gauche en rouge |
|
|
Tester les différentes couleurs et colorier proprement avec des crayons de couleur la roue chromatique distribuée par le professeur
|
|

|
Programme n°2 : Allumer une DEL RGB pendant 5s |
|
|
Créer le programme suivant Méthode Allumer la LED droite en bleu Attendre 5s Éteindre la LED droite |
Éléments nécessaires
|

|
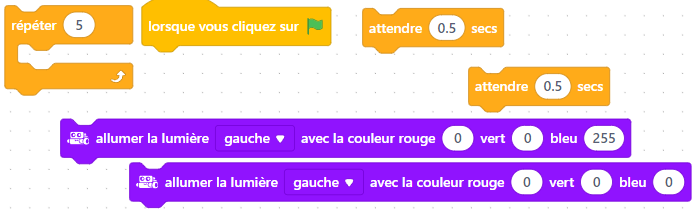
Programme n°3 : Faire clignoter (0.5s) une DEL RGB en bleu 5 fois de suite |
|
|
Méthode Réaliser une boucle et mettre à l'intérieur Allumer la del gauche Attendre 0.5s Éteindre la del gauche Attendre 0.5s Programmer la boucle pour qu'elle fasse le programme 5 fois |
Éléments nécessaires
|
|
Programme n°4 : Identique au programme 1, mais faire clignoter les 2 DEL RGB en alternance
|
|
|
Méthode Réaliser une boucle et mettre à l'intérieur Allumer la del gauche éteindre la del droite Attendre 0.5s Éteindre la del gauche allumer la del droite Attendre 0.5s Programmer la boucle pour qu'elle fasse le programme 6 fois |
Éléments nécessaires à ajouter
|
|
Point bonus n°1: - Réalisez un gyrophare de police en accélérant l'animation (0,2s).
Point bonus n°2: - Modifiez la couleur des dels. Créez une animation de Noël lumineuse multicolore, par exemple: rouge, bleu, vert....
|
|
|
Programme n°5 : Utiliser une condition et le détecteur de lumière pour faire fonctionner le programme 2
|
|
|
Méthode Utiliser une boucle pour toujours Avant la boucle du programme 2, ajouter une condition Si ( il se passe ceci) alors ... Ici l'événement déclencheur est la baisse de la lumière mesurée sur la carte en dessous de 500 lux (Valeur à ajuster selon l'éclairage de la salle de classe) Il faudra éteindre les lampes à la fin du programme pour ne pas gêner le capteur de luminosité. |
Éléments nécessaires à ajouter au programme n°4
|
|
N'oubliez pas de cliquer sur le drapeau vert Ne reste plus qu'à mettre votre main pour masquer la lumière et lancer le programme. |
|

|
Programme n°6 : Utiliser le capteur de luminosité pour créer une alarme.
|
|
|
Méthode Utiliser une boucle pour toujours Utiliser la condition si alors Une condition Si ( il se passe ceci) alors Ici l'événement déclencheur est la baisse de la lumière mesurée sur la carte en dessous de 500 lux (Valeur à ajuster selon l'éclairage de la salle de classe). Jouer la note de l'alarme sur le buzzer. |
Éléments nécessaires
|
|
Point Bonus : Jouer une mélodie
|
|

|
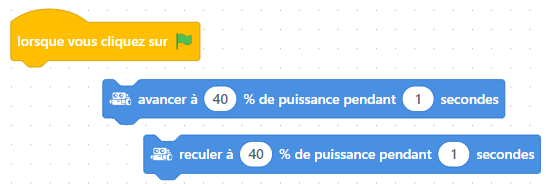
Programme n°7 : Le robot avance durant 1 seconde à la vitesse 40% puis recule pendant 1 seconde à la vitesse 40%. |
|
Éléments nécessaires
|
|
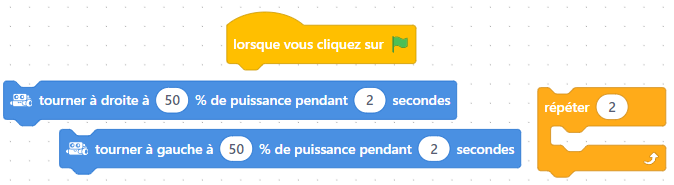
Programme n°8 : Le robot tourne en rond 2s (sens horaire) puis 2s (sens trigonométrique) 2 fois de suite |
|
Éléments nécessaires
|
2.Le robot est en mode autonome "Téléverser"
|
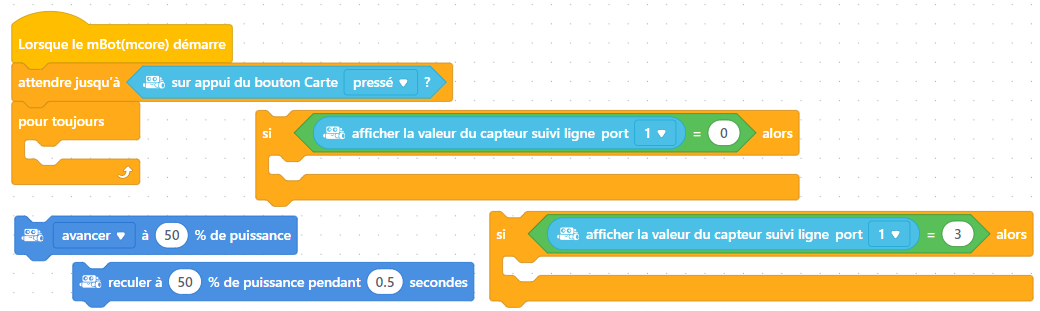
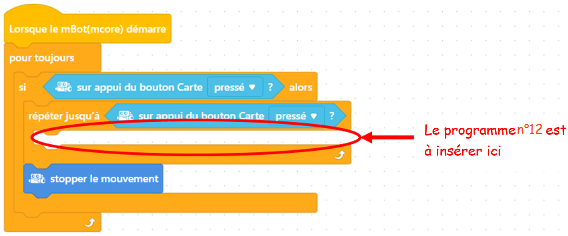
Cliquez sur "Téléverser" Quand vous aurez fini d'écrire le programme, vous cliquerez sur Vous imbriquerez les programmes à réaliser dans cette boucle. Ce programme permettra de mettre en marche le robot en appuyant sur le bouton disponible sur le dessus et de l'éteindre en appuyant à nouveau sur le même bouton.
Pour tester le programme, il suffira d'appuyer sur le bouton du robot pour vérifier le bon fonctionnement. A l'appui suivant le robot s'arrêtera et ainsi de suite... Pour faire le programme n°9 reproduire le programme ci-dessus. |

|
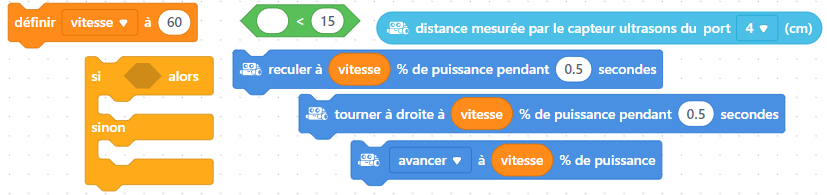
Programme n°9 : En mode autonome, le robot avance s'il voit un obstacle devant lui, il recule, tourne à droite et reprend son avance
|
|
|
Méthode Régler la vitesse à 60 ( utiliser une variable) Si la distance < 15 reculer pendant 0,5s puis tourner à droite pendant 0,5s Sinon avancer Pour créer une variable que vous appellerez "vitesse", cliquez sur
Retirer le câble USB et poser le robot par terre avant d'exécuter le programme. |
Éléments nécessaires
|

Créé avec HelpNDoc Personal Edition: Générateur complet de livres électroniques Kindle