4 - Programmes utilisant le détecteur à ultrasons
1.Le robot est en mode "vivre"
|
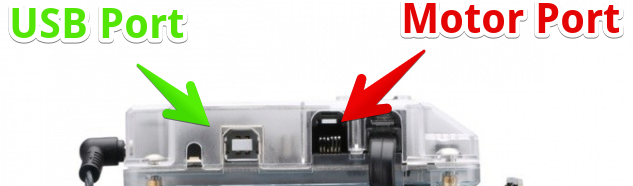
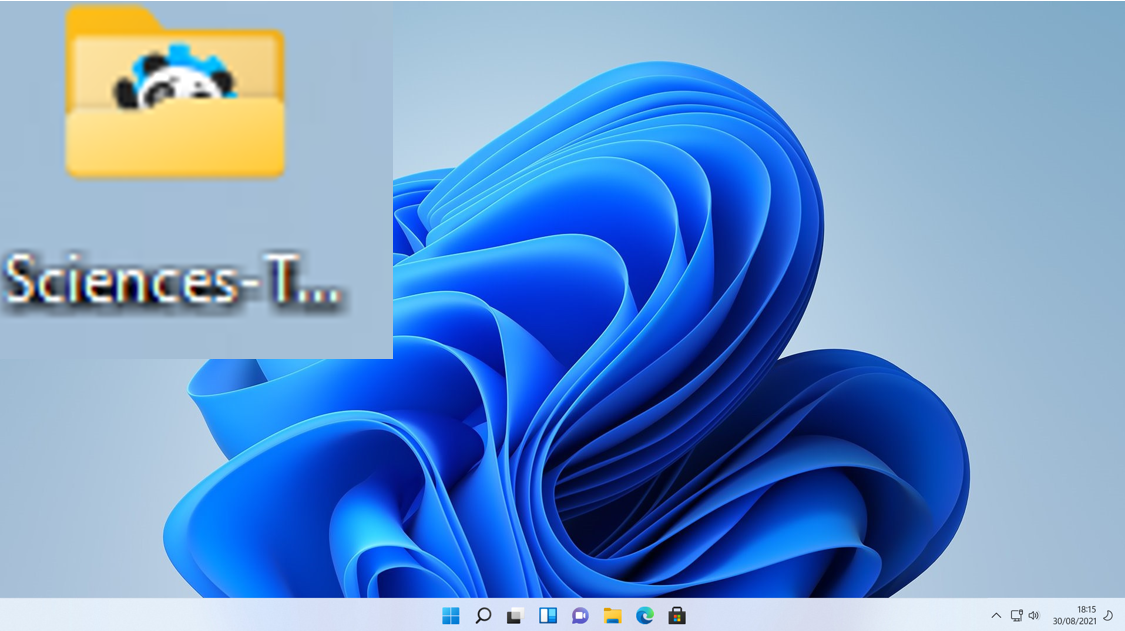
Pour démarrer le logiciel cliquer sur le dossier Sciences et Technologies situé sur le bureau du PC. Ensuite cliquer sur Cliquez sur Utilisez le câble USB pour relier l'ordinateur au robot. Basculer l'interrupteur sur le côté du mBot sur ON Vérifiez que le "mode En direct"est sélectionné Cliquer sur Construisez les programmes ci-desous et testez les en cliquant sur. Appelez le professeur pour faire constater vos résultats. |
|







|
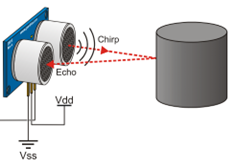
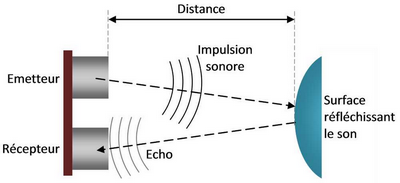
Programme n°1 (mesure de distances) Je souhaite afficher sur l'écran de l'ordinateur la distance que mesure le capteur. On utilisera notre main pour vérifier le bon fonctionnement du capteur.
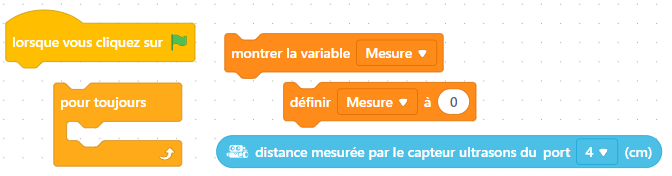
Expliquez à votre binôme comment fonctionne la mesure à ultra-sons Réalisez le programme à l'aide des éléments suivants :
Vous aurez besoin de créer une variable qu'on appelera "mesure". Elle apparaitera alors dans la fenêtre d'animation en haut à gauche.
Une fois le programme écrit, testez le en cliquant sur le drapeau vert. Vérifier la mesure avec une régle. Appelez le professeur pour faire constater vos résultats. |
|
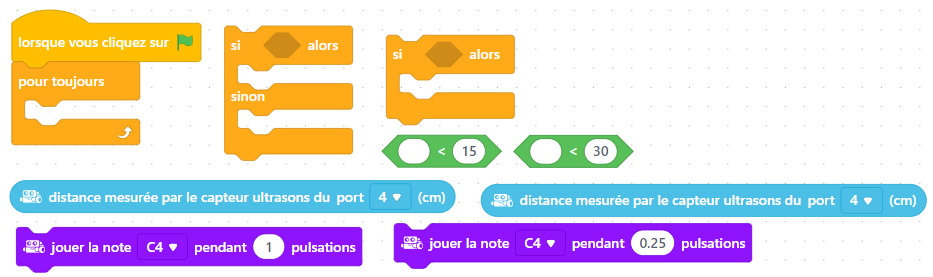
Programme n°2 (radar de recul)
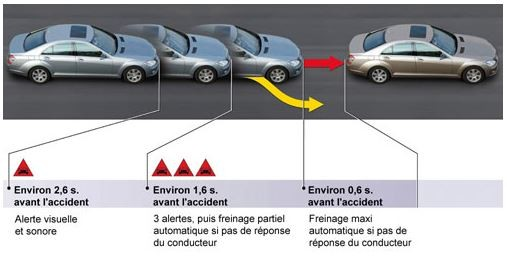
- Si l'obstacle est à plus de 30 cm, le sonnerie ne retentit pas. - Lorsque la distance entre le capteur et votre main est inférieure à 30 cm, faire émettre par le robot des bips (0.25 pulsation). - Si la distance est inférieure à 15 cm émettre un bip continu (1 pulsation). Voila comment fonctionne les détecteurs de distance et aide au stationnement des voitures. Réalisez le programme à l'aide des élèments suivants :
Testez le en cliquant sur le drapeau vert. Appelez le professeur pour faire constater vos résultats. Pour aller plus loin :
Si l'obstacle est à plus de 30 cm, le sonnerie ne retentit pas. Plus la distance entre le robot et l'obstacle se réduit plus la fréquence du bip accélère jusqu'à devenir continue.
|

2.Le robot est en mode autonome "Téléverser"
|
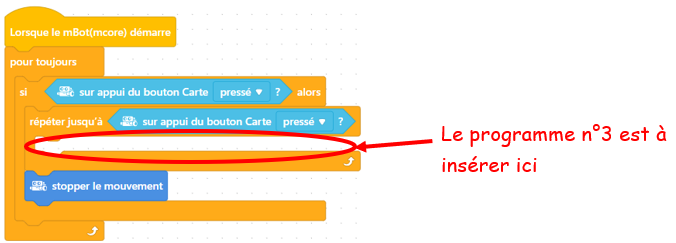
Cliquez sur "Téléverser" Quand vous aurez fini d'écrire le programme, vous cliquerez sur Vous imbriquerez les programmes à réaliser dans cette boucle. Ce programme permettra de mettre en marche le robot en appuyant sur le bouton disponible sur le dessus et de l'éteindre en appuyant à nouveau sur le même bouton.
Pour tester le programme, il suffira d'appuyer sur le bouton du robot pour vérifier le bon fonctionnement. A l'appui suivant le robot s'arrêtera et ainsi de suite... Pour faire le programme n°3 reproduire le programme ci-dessus. |
|
Programme n°3 (anti-collision) Maintenant, couplez la fonction vue avec le programme n°2 avec la fonction avancer du robot: -Lorsque le robot se rapproche à moins de 50 cm de l’obstacle ralentir sa vitesse à 50% de sa puissance. -Si la distance est inférieur à 30 cm, stopper le robot. Utilisez le programme ci-dessus pour mettre en marche et stopper le robot. Créer la variable Distance Créer la variable Vitesse L'algorithme du programme est le suivant : définir la variable Distance à distance mesurée par le capteur ultrason du port définir la variable Vitesse à 100 si variable Distance < 30 alors définir la variable Vitesse à 0 sinon si variable Distance < 50 alors définir la variable Vitesse à 50 Avancer à la variable Vitesse Réalisez le programme et testez le. Appelez le professeur pour faire constater vos résultats. |
|
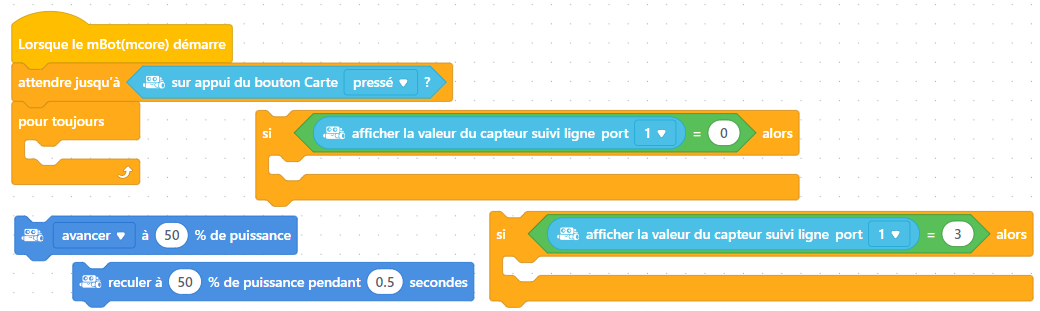
Programme n°4 (véhicule autonome) Réalisez un programme permettant à un robot de suivre une ligne et en même temps de répondre au contrainte du programme précédent (n°3). Télécharger le programme et tester le. Appelez le professeur pour faire constater le résultat. C'est le principe de la voiture autonome. Pour aller plus loin: Emettre une alarme sonore et visuelle lorsque le robot se rapproche dangereusement d'un obstacle.
|
Créé avec HelpNDoc Personal Edition: Élevez votre documentation vers de nouveaux sommets avec le référencement intégré de HelpNDoc