7 - Le suiveur de ligne
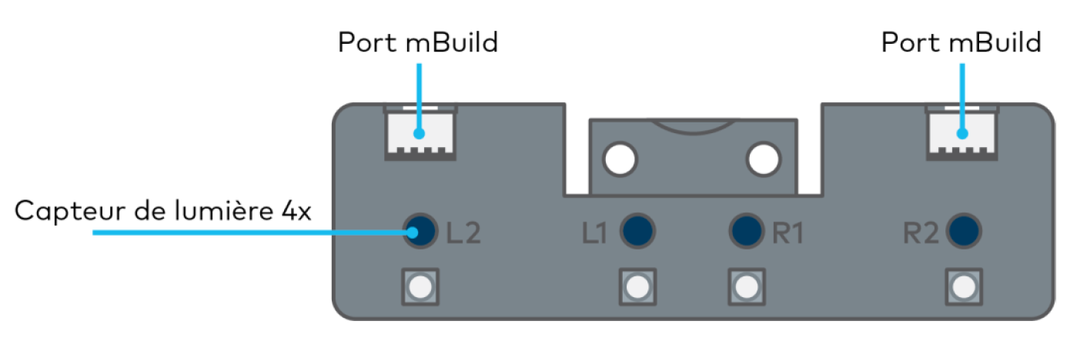
Le capteur quad RGB situé à l'avant du robot Mbot2 est constitué de 4 capteurs de lumière. Il va permettre d'orienter le robot en détectant les niveaux de gris sur le sol et de détecter 8 couleurs (blanc, rouge, jaune, vert, cyan, bleu, violet, noire).
En fonction du mode choisi (Ligne, arrière plan, blanc, rouge...) le capteur quad RGB détectera la couleur choisie.
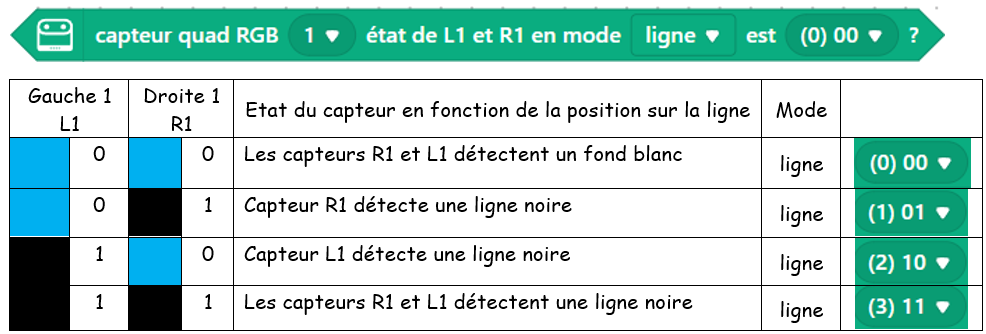
Exemple mode ligne
|
Programme n°1 : Si une couleur rouge est détectée, allumer toutes les LEDS en rouge |
|
|
Créer le programme suivant Méthode Lorsque le bouton A est pressé Utiliser une boucle pour toujour Si la couleur rouge est détectée (L1=1 et R1=1) Allumer toutes les leds en rouge Sinon Eteindre toutes les leds |
Éléments nécessaires
|

|
Programme n°2 : Si une couleur verte est détectée, allumer toutes les LEDS en vert |
|
Programme n°3 : Si une couleur bleue est détectée, allumer toutes les LEDS en bleu |
|
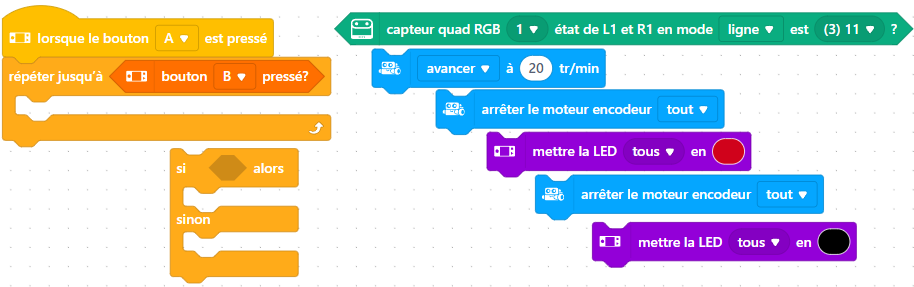
Programme n°4 : Le robot suit une ligne droite et s'arrête si il sort de la ligne en allumant les leds en rouge |
|
|
Lorsque le bouton A est pressé Mbot 2 suit une ligne noire , si il quitte la ligne il s'arrête et allume les leds en rouge. Un appui sur le bouton B arrête le robot et étteint les leds. Créer le programme suivant Méthode Lorsque le bouton A est pressé Répéter jusqu'au moment où le bouton B est pressé Si le capteur RGB détecte la ligne (L1=1 et R1=1) Avancer à la vitesse de 20 tr/min Sinon Arrêter le moteur Mettre toutes les leds en rouge Arréter le moteur Eteindre les leds |
Éléments nécessaires
|
|
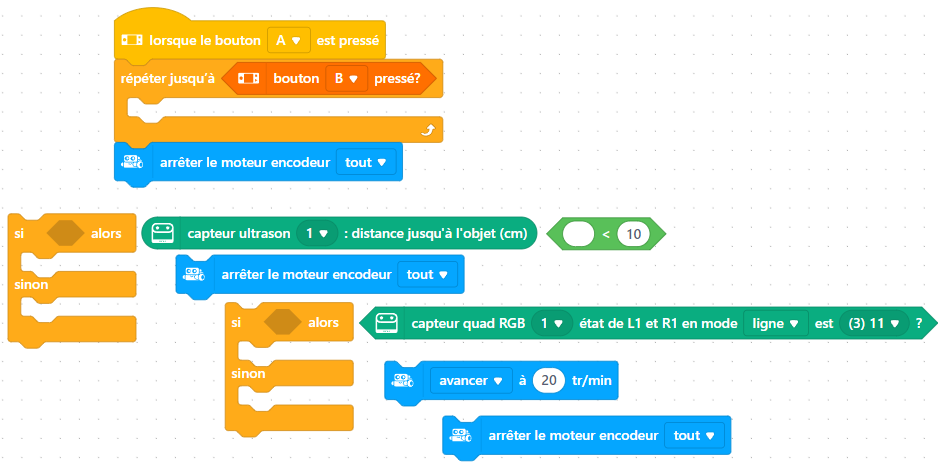
Programme n°5 : Le robot suit une ligne droite et s'arrête si il sort de la ligne ou il si détecte un obstacle |
|
|
Lorsque le bouton A est pressé Mbot 2 suit une ligne noire , si il détecte un obstacle ou si il quitte la ligne il s'arrête. Un appui sur le bouton B arrête le robot. Créer le programme suivant Méthode Lorsque le bouton A est pressé Répéter jusqu'au moment où le bouton B est pressé Si le capteur à ultason détecte un obstacle à une distance inférieure à 10cm Arrêter le moteur Sinon Si le capteur RGB détecte la ligne (L1=1 et R1=1) Avancer à la vitesse de 20 tr/min Sinon Arrêter le moteur Arréter le moteur |
Éléments nécessaires
|
|
Programme n°6 : La même chose que le programme 5 avec en plus les leds qui s'allume en rouge lorsque le robot s'arrête |
|
|
Les blocs à rajouter sont les suivants: |
|

Le robot est en mode autonome "téléverser"
|
Cliquer sur "Téléverser" Lorsque vous aurez fini d'écrire le programme, vous cliquerez sur Le câble USB peut alors être retiré. |

|
Programme n°7 : Le robot suit une ligne droite ou courbe |
|
|
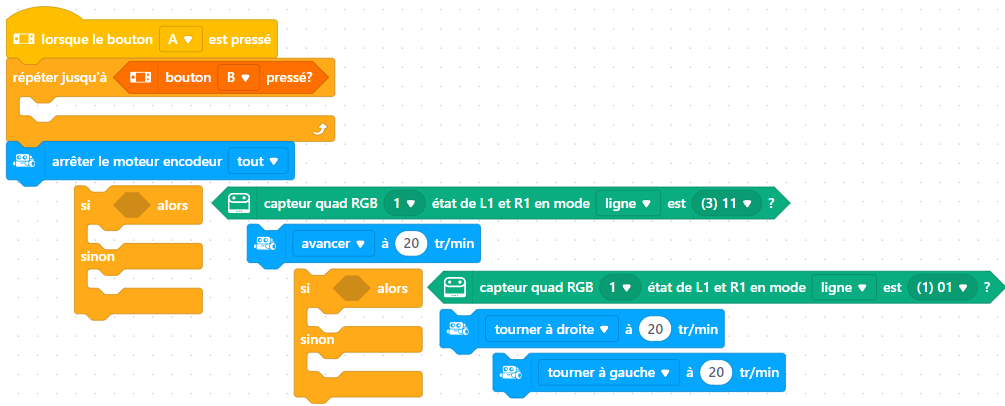
Lorsque le bouton A est pressé Mbot 2 suit une ligne droite ou courbe. Un appui sur le bouton B arrête le robot. Créer le programme suivant Méthode Lorsque le bouton A est pressé Répéter jusqu'au moment où le bouton B est pressé Si le capteur RGB détecte la ligne (L1=1 et R1=1) Avancer à la vitesse de 20 tr/min Sinon Si le capteur RGB détecte la ligne (L1=0 et R1=1) Tourner à droite à la vitesse de 20 tr/min Sinon Tourner à gauche à la vitesse de 20 tr/min Arréter le moteur |
Éléments nécessaires
|
|
Programme n°8 : La même chose que le programme 7 mais vous augmenter les vitesses à 35 tr/mn Que se passe t-il? proposer une solution. |
|
Programme n°9 : Une solution pour que le robot suive une ligne droite ou courbe à une vitesse de 35 tr/min |
|
|
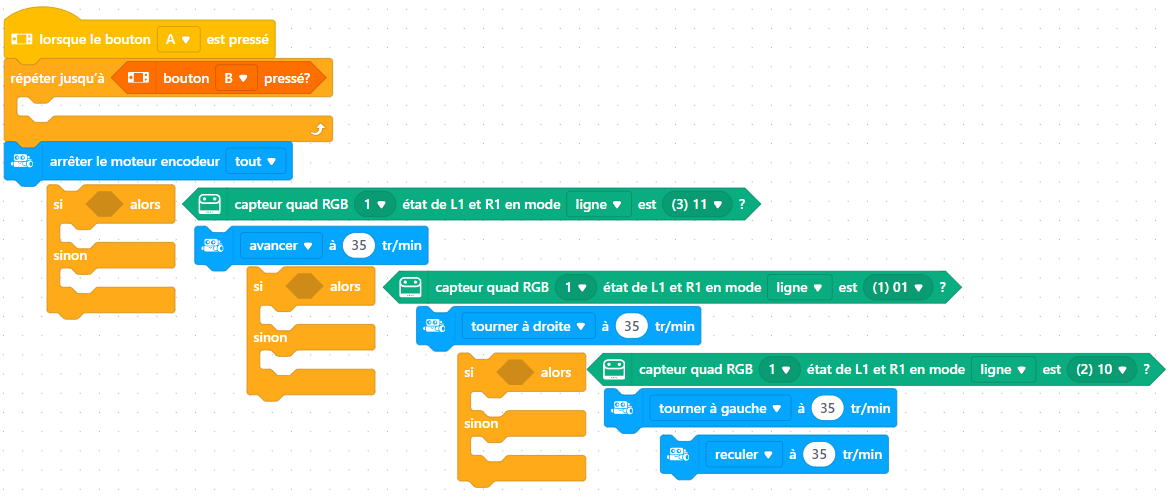
Lorsque le bouton A est pressé Mbot 2 suit une ligne droite ou courbe à une vitesse de 35tr/mn. Un appui sur le bouton B arrête le robot. Créer le programme suivant Méthode Lorsque le bouton A est pressé Répéter jusqu'au moment où le bouton B est pressé Si le capteur RGB détecte la ligne (L1=1 et R1=1) Avancer à la vitesse de 35 tr/min Sinon Si le capteur RGB détecte la ligne (L1=0 et R1=1) Tourner à droite à la vitesse de 35 tr/min Sinon Si le capteur RGB détecte la ligne (L1=1 et R1=0) Tourner à gauche à la vitesse de 35 tr/min Sinon Reculer à la vitesse de 35 tr/min Arréter le moteur |
Éléments nécessaires
|
|
Programme n°10 : Le robot suit une ligne droite ou courbe à une vitesse de 35 tr/min et s'arrête si il rencontre un obstacle |
|
|
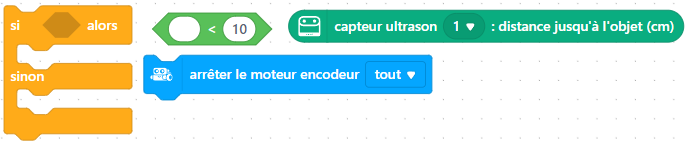
Lorsque le bouton A est pressé Mbot 2 suit une ligne droite ou courbe et s'arrête si il rencontre un obstacle. Un appui sur le bouton B arrête le robot. Créer le programme suivant Méthode Lorsque le bouton A est pressé Répéter jusqu'au moment où le bouton B est pressé Si le capteur à ultason détecte un obstacle à une distance inférieure à 10cm Arrêter le moteur Sinon Si le capteur RGB détecte la ligne (L1=1 et R1=1) Avancer à la vitesse de 35 tr/min Sinon Si le capteur RGB détecte la ligne (L1=0 et R1=1) Tourner à droite à la vitesse de 35 tr/min Sinon Si le capteur RGB détecte la ligne (L1=1 et R1=0) Tourner à gauche à la vitesse de 35 tr/min Sinon Reculer à la vitesse de 35 tr/min Arréter le moteur |
Blocs à rajouter au programme n°9
|
|
Programme n°11 : La même chose que le programme 10 avec en plus les leds qui s'allument en rouge lorsque le robot et à l'arrêt |
Créé avec HelpNDoc Personal Edition: Optimisez vos capacités de documentation avec un outil de création d'aide