6 - Apprendre à déplacer le robot
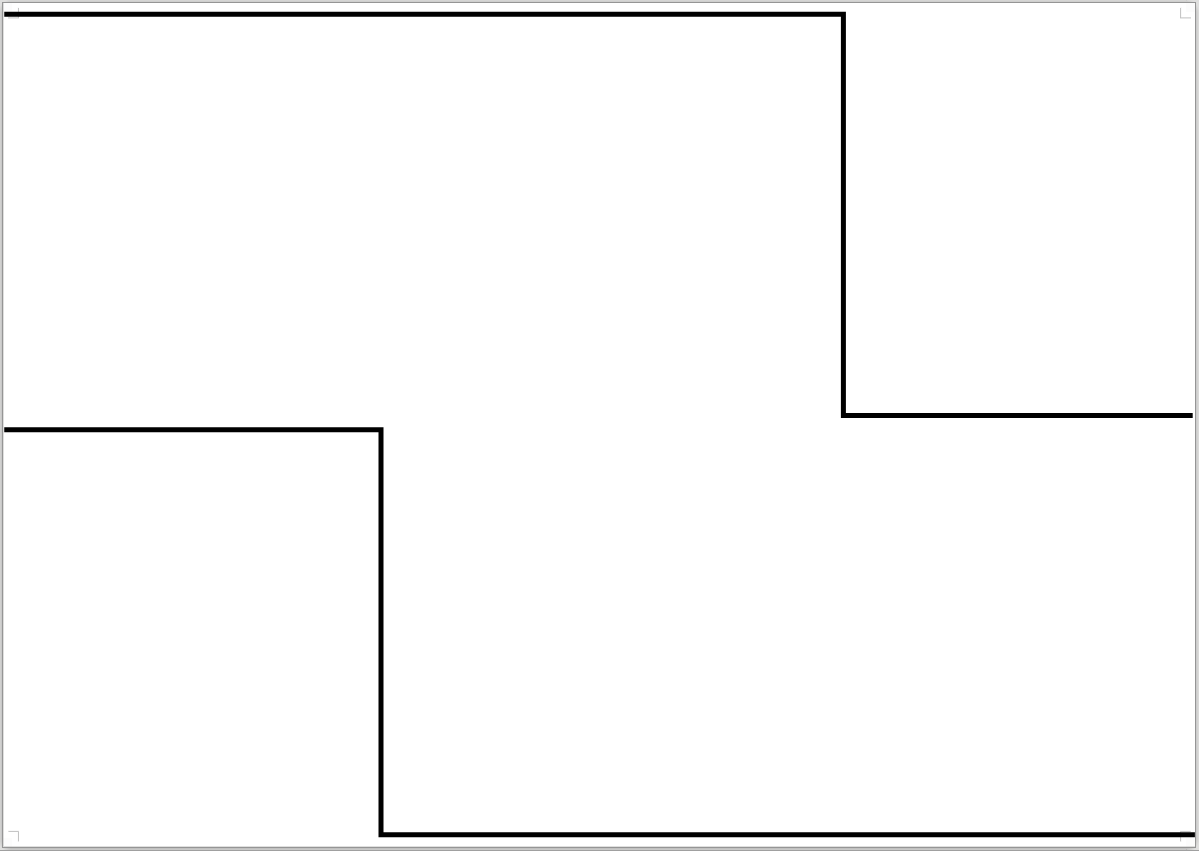
Défi 1: En utilisant les blocs ci-dessous, après un appui sur la touche espace, mBot2 doit suivre le parcours tracé sur une feuille distribuée. (mode En direct)
|
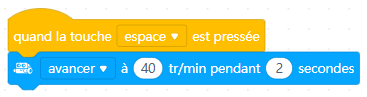
Ce bloc de code vous permet de déplacer mBot2 en avant, en arrière, à gauche et à droite à une vitesse de rotation spécifique des roues et pendant un certain nombre de secondes. Exemple : Lorsque l'on appuie sur la touche espace du claviermBot2 avance pendant 2s à une vitesse de 40 tr/min.
|
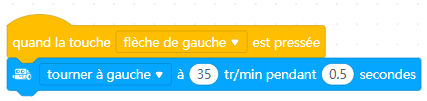
Ce bloc de code vous permet de faire tourner mBot2 à droite à une vitesse de 50 tr/min pendant 1 secondes. Exemple : mBot 2 peut être contrôlé à l'aide des touches flêchées du clavier. En appuyant sur la flèche de gauche, le mBot2 tournera à gauche à 35 tr/min pendant 0.5s.
|


Défi 2: La même chose que le défi 1 mais en utilisant les blocs ci-dessous. (mode En direct)
|
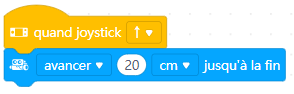
Ce bloc de code permet de faire avancer le robot d'une certaine distance. Exemple : Un appui sur le joystick du CyberPi vers le haut déplacera le robot de 20cm vers l'avant.
|
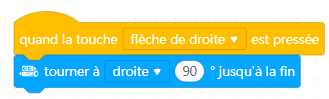
Avec ce bloc de code, vous pouvez faire tourner le mBot2 d'un certain nombre de degrés, et vous pouvez choisir si la rotation doit être vers la gauche ou vers la droite. Exemple : mBot 2 peut être contrôlé à l'aide des touches flêchées du clavier. En appuyant sur la flèche de droite, le mBot2 tournera de 90degrés vers la droite.
|


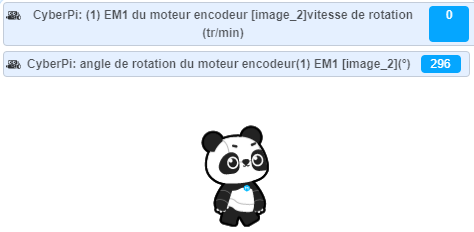
Défi3: Même programme que le défi 2, avec en plus la lecture de la vitesse et de la rotation sur l'écran du PC. (mode En direct)
|
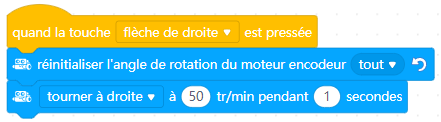
Il faut cocher les cases à côté de ces blocs. Ne pas oublier dans votre programme de remettre à 0 les angles des codeurs au début du programme. Exemple : Un appui sur la fléche de droite réinitialise les angles des codeurs à 0; mBot 2 tourne à droite pendant 1 s et affiche l'angle du codeur EM1 sur l'écran du PC. |
|
|
|
|

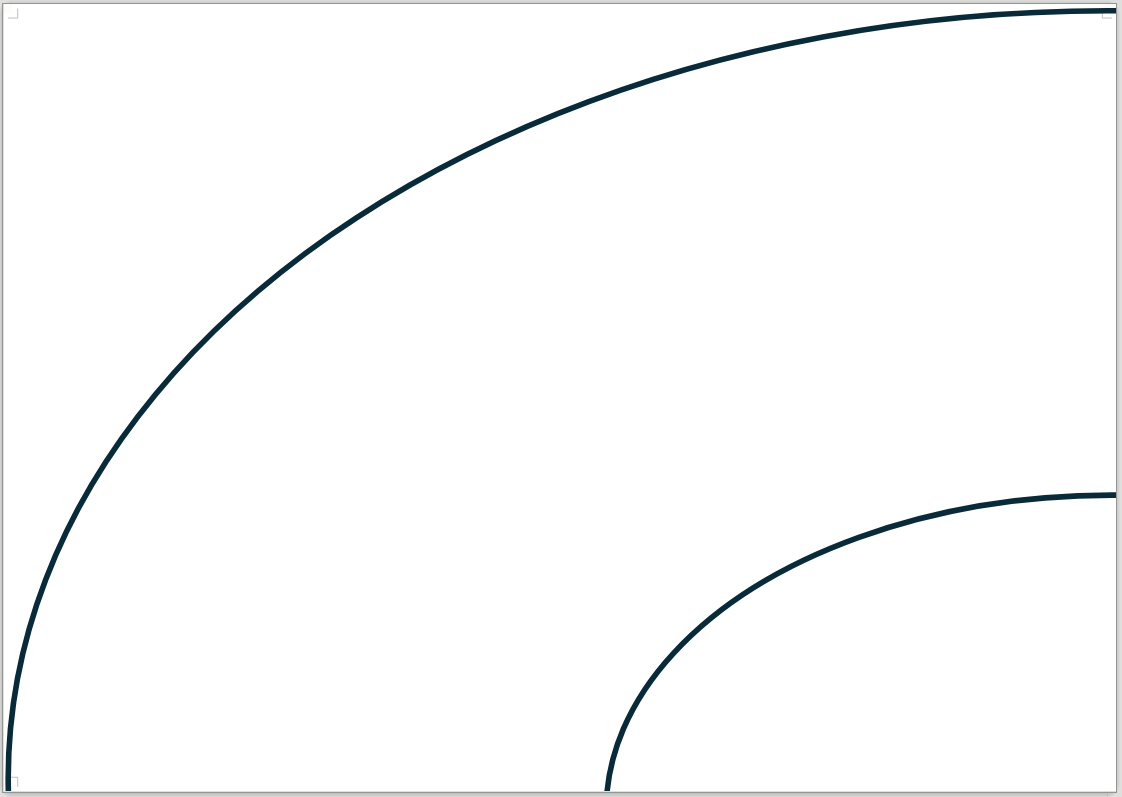
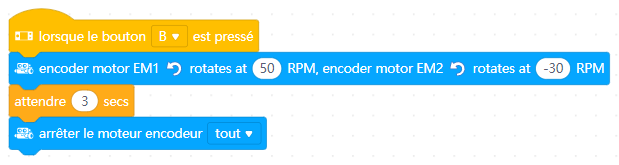
Défi4 : mBot2 doit suivre une courbe. (mode En direct)
|
Ce bloc permet de contôler les moteurs de mBot 2 indépendamment. Exemple : Avec le programme ci-dessous, le mBot2 se déplacera dans une courbe pendant 3 secondes avant de s'arrêter. La valeur de l'un des moteurs est négative, car les moteurs sont montés dans des directions opposées. Pour déplacer le robot dans une direction, vous devez donc faire tourner l'un des moteurs dans le sens opposé. Que se passe-t-il si les deux roues tournent à 40 tours par minute?
|
Ce bloc de code vous permet de faire en sorte que le robot arrête de bouger. |


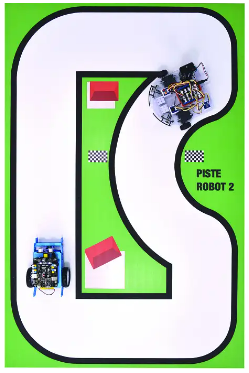
Défi 5: mBot 2 doit suivre une piste en utilisant les blocs des défis 1,2,3 et4. (mode Téléverser)
Créé avec HelpNDoc Personal Edition: Générateur de documentations PDF gratuit