8 - Le capteur à ultrason, le véhicule autonome
|
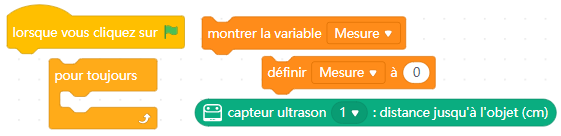
Défi 1: Je souhaite afficher sur l'écran de l'ordinateur la distance que mesure le capteur à ultrason. On utilisera notre main pour vérifier le bon fonctionnement du capteur. |
||
|
|
|
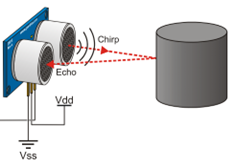
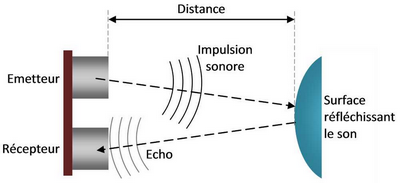
La vitesse du son est de 340 m/s. L'obtention de l'information est très rapide. Il fonctionne pour des valeurs comprises entre 3 cm et 400 cm. |
|
Réalisez le programme à l'aide des blocs suivants :
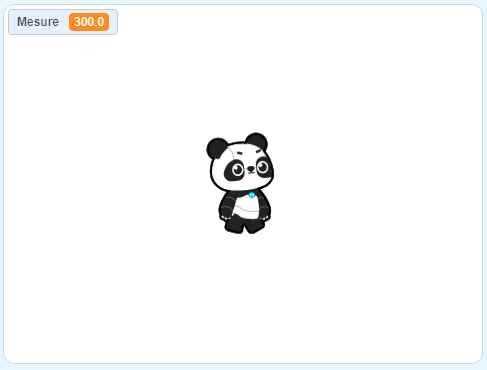
Vous aurez besoin de créer une variable qu'on appelera "mesure". Elle apparaitera alors dans la fenêtre d'animation en haut à gauche.
Une fois le programme écrit, testez le en cliquant sur le drapeau vert. Vérifier la mesure avec une régle. Appelez le professeur pour faire constater vos résultats |
||
|
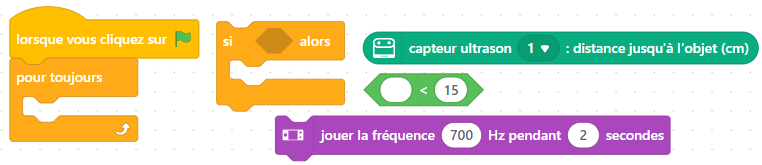
Défi 2: Radar de recul, si un obstacle est détecté à une distance inférieure à 15 cm, émettre un bib pendant 2s. Réalisez le programme à l'aide des blocs suivants :
|
|
Défi 3: Même chose que le défi 2, mais avec en plus les lumières bleues du capteur à ultrason qui s'allument lorsque la distance est inférieure à 15 cm. Réalisez le programme à l'aide des blocs suivants :
|

|
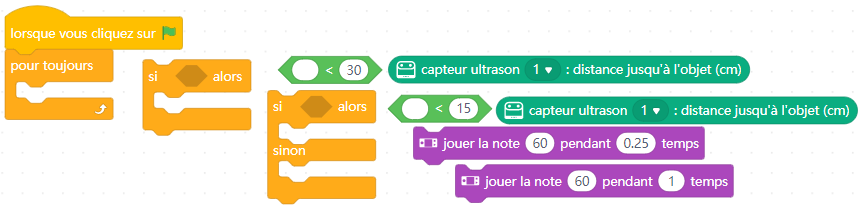
Défi 4: Radar de recul amélioré - Si l'obstacle est à plus de 30 cm, le sonnerie ne retentit pas. - Lorsque la distance entre le capteur et votre main est inférieure à 30 cm, faire émettre par le robot des bips (0.25 pulsation). - Si la distance est inférieure à 15 cm émettre un bip continu (1 pulsation). |
|
|
Méthode Utiliser une boucle pour toujours Si la distance est inférieure à 30 cm Si la distance est inférieure à 15 cm Jouer la note 60 pendant 0.25 temps Sinon Jouer la note 60 pendant 1 temps |
Réalisez le programme à l'aide des élèments suivants:
|
|
Défi 5: Le radar de recul comme sur les voitures Si l'obstacle est à plus de 30 cm, le sonnerie ne retentit pas. Plus la distance entre le robot et l'obstacle se réduit plus la fréquence du bip accélère jusqu'à devenir continue. Réalisez le programme à l'aide des élèments suivants:
|

Le robot est en mode autonome "téléverser"
|
Cliquer sur "Téléverser" Lorsque vous aurez fini d'écrire le programme, vous cliquerez sur Le câble USB peut alors être retiré. |

|
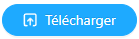
Défi 6: Le radar anticolision Si mBot rencontre un obstacle situé devant lui à 50 cm il doit s'arréter. Tester votre robot sur le sol.
|
|
Défi 7: Le radar anticolision avec alarme sonore et lumineuse Si mBot rencontre un obstacle situé devant lui à 50 cm il doit s'arrêter, il émet un son sonore continu et les lumières du capteur à ultrason émettent une lumière bleu.
|
|
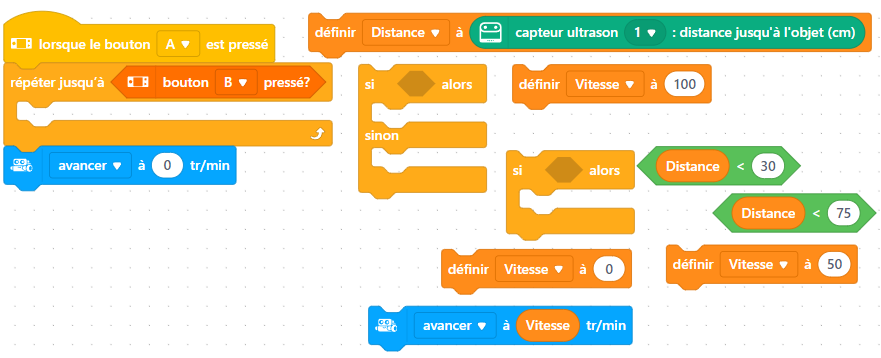
Défi 8: Le radar anticolision amélioré Si mBot rencontre un obstacle situé devant lui à 50 cm il doit s'arrête. -Lorsque le robot se rapproche à moins de 75 cm de l’obstacle ralentir sa vitesse à 50% de sa puissance. -Si la distance est inférieur à 30 cm, stopper le robot. Utilisez le programme ci-dessus pour mettre en marche et stopper le robot. |
|
|
L'algorithme du programme est le suivant : définir la variable Distance à distance mesurée par le capteur ultrason du port définir la variable Vitesse à 100 si variable Distance < 30 alors définir la variable Vitesse à 0 sinon si variable Distance < 75 alors définir la variable Vitesse à 50 Avancer à la variable Vitesse |
|
|
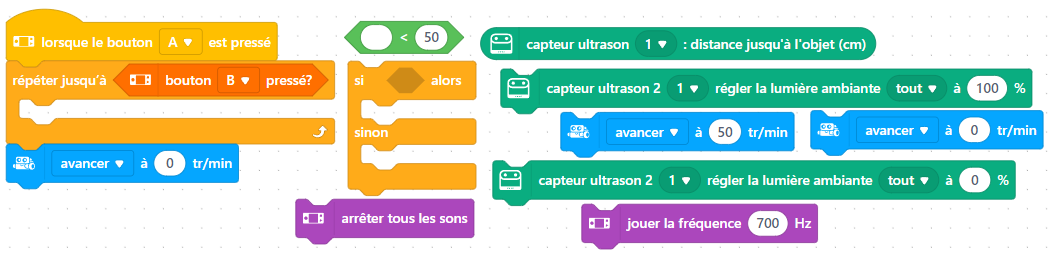
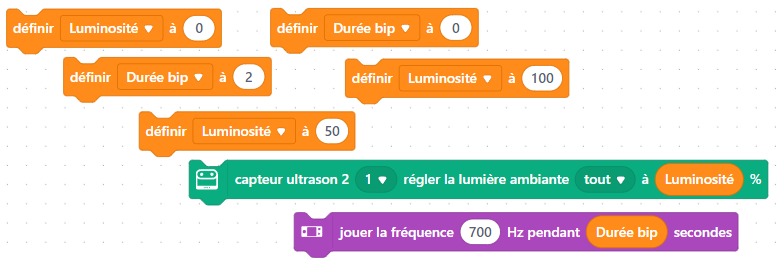
Défi 9: Le radar anticolision amélioré avec alarme sonore et lumineuse La même chose que le défi 8 avec en plus les lumières du capteur à ultrason qui émettent une lumière bleue à 50 % lorsque la distance est < à 75cm, une lumière bleue à 100% lorsque la distance est <30cm. Un bip de 2s est émis lorsque la distance est < 30cm. Blocs à rajouter au défi 8
|
Créé avec HelpNDoc Personal Edition: Partagez facilement votre documentation avec le monde via un magnifique site Web