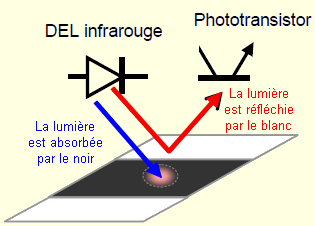
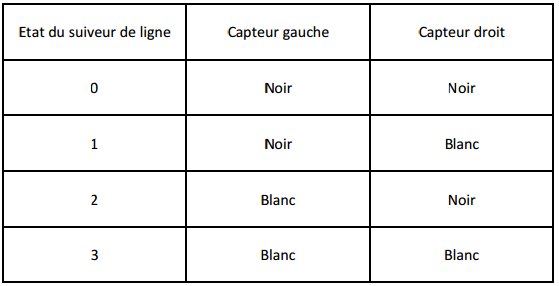
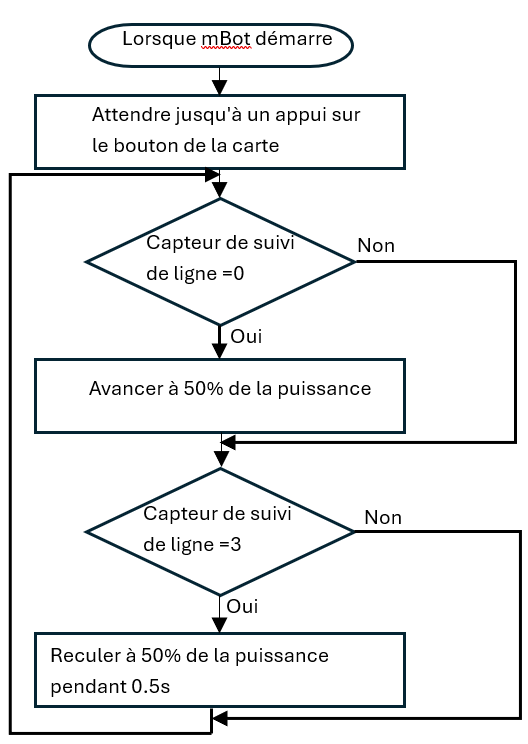
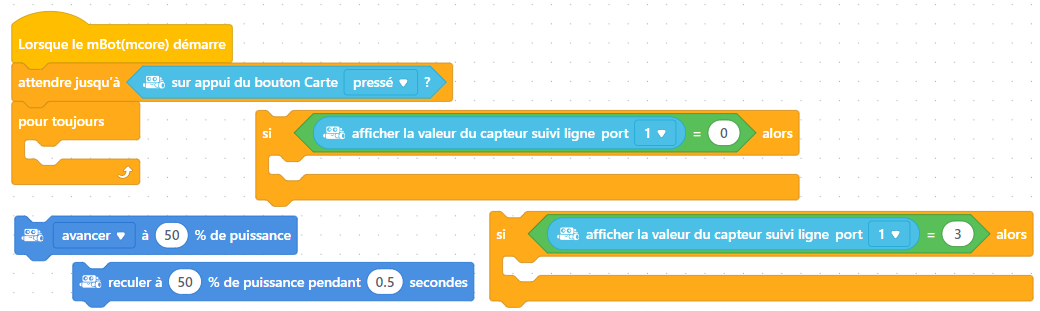
Le robot avance lorsqu'il détecte une couleur noire (état du suiveur de ligne = 0). Le robot recule pendant 0.5s (état du suiveur de ligne = 3) lorsqu'il détecte une couleur blanche.
Le programme doit démarrer lorsqu'on appuie sur le bouton situé sur le dessus du mBot.
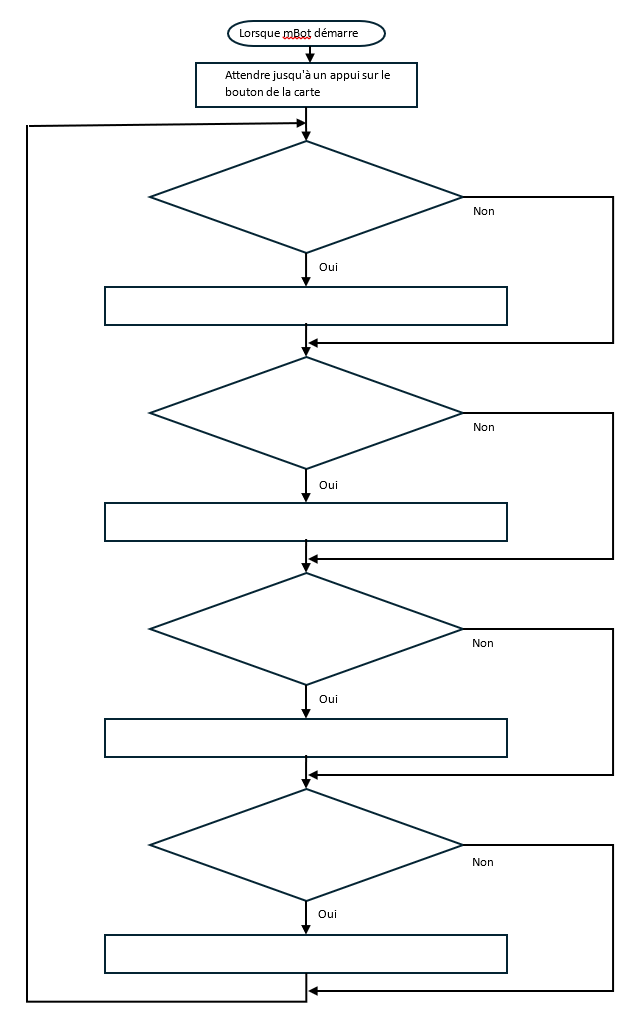
Représentation de l'algorithme en organigramme
Tester le programme
Instructions à utiliser :
Réaliser une capture d'écran de votre programme et la coller dans votre document Writer
Programme n°14 : Le suiveur de ligne, suite du programme n°13
Le robot doit suivre une ligne noire en forme de huit. Si il se retrouve sur du blanc il recule pendant 0.5s.
Le programme doit démarrer lorsqu'on appuie sur le bouton situé sur le dessus du mBot.
Représentation de l'algorithme en organigramme, à compléter sur la feuille.
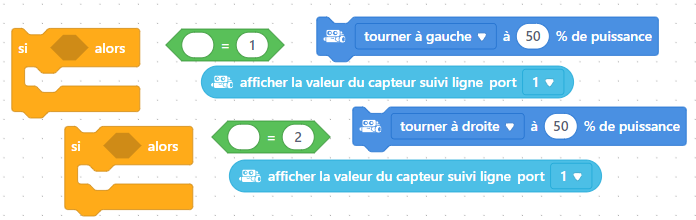
Instructions à rajouter au programme n°13 :
Compléter le tableau et l'algorithme sur le document réponse et montrer le fonctionnement au professeur
Réaliser une capture d'écran de votre programme et la coller dans votre document Writer