5 - Programmes utilisant le détecteur à ultrasons
1.Le robot est en mode "vivre"
|
Pour démarrer le logiciel cliquer sur le dossier Sciences et Technologies situé sur le bureau du PC. Ensuite cliquer sur Cliquez sur Utilisez le câble USB pour relier l'ordinateur au robot. Basculer l'interrupteur sur le côté du mBot sur ON Vérifiez que le "mode En direct"est sélectionné Cliquer sur Construisez les programmes ci-desous et testez les en cliquant sur. Appelez le professeur pour faire constater vos résultats. |
|








|
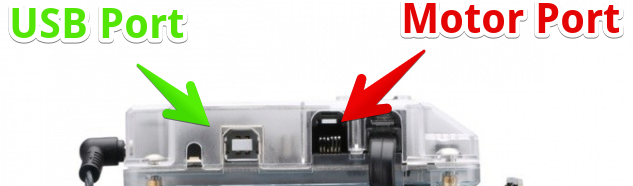
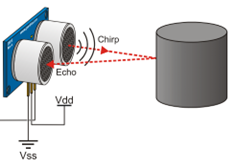
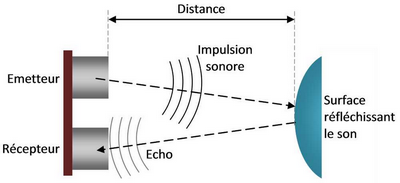
Programme n°15 : Mesurer une distance |
||
|
|
|
|
|
Je souhaite afficher sur l'écran de l'ordinateur (en haut à gauche) la distance que mesure le capteur à ultrasons. |
||
|
|
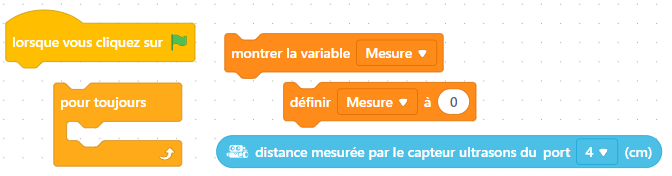
Créer la variable Mesure Cliquez sur |
|
|
Algorithme Lorsque vous cliquez sur Montrer la variable Mesure Dans un boucle pour toujours Définir Mesure à la ditance mesurée par le capteur ultrasons du port 4 |
Instructions à utiliser :
|
|
|
||


|
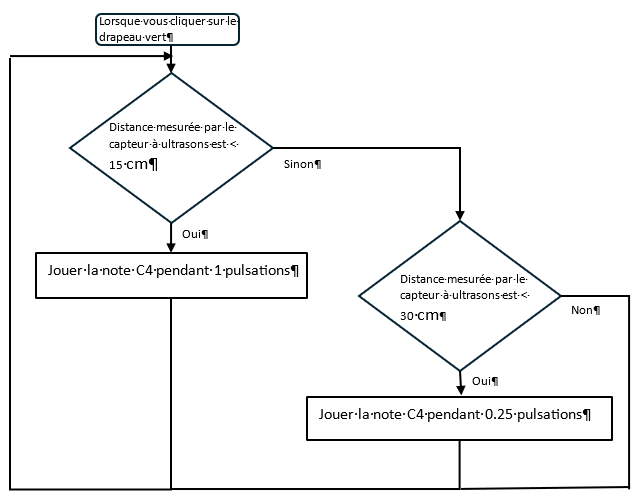
Programme n°16 : radar de recul
|
|
|
Représentation de l'algorithme en organigramme
|
Instructions à utiliser :
|
|
|
|
Programme n°17 : Radar de recul amélioré
|

2.Le robot est en mode autonome "Téléverser"
|
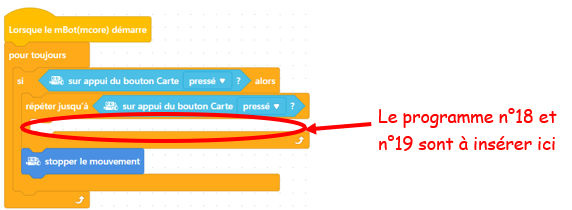
Cliquez sur "Téléverser" Quand vous aurez fini d'écrire le programme, vous cliquerez sur Vous imbriquerez les programmes à réaliser dans cette boucle. Ce programme permettra de mettre en marche le robot en appuyant sur le bouton disponible sur le dessus et de l'éteindre en appuyant à nouveau sur le même bouton.
Pour tester le programme, il suffira d'appuyer sur le bouton du robot pour vérifier le bon fonctionnement. A l'appui suivant le robot s'arrêtera et ainsi de suite... |

|
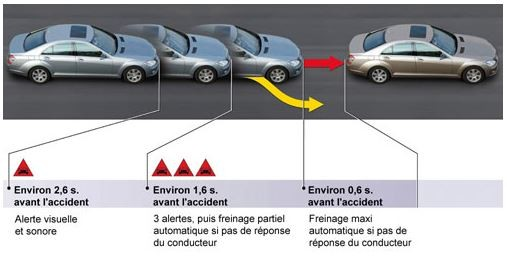
Programme n°18 : Anti-collision
L'algorithme du programme est le suivant : définir la variable Distance à distance mesurée par le capteur ultrason du port 4 définir la variable Vitesse à 100 si Distance < 30 alors définir Vitesse à 0 sinon si Distance < 60 alors définir Vitesse à 50 Avancer à Vitesse % puissance
|
|
Programme n°19 : Le véhicule autonome
L'algorithme du programme est le suivant : définir la variable Distance à distance mesurée par le capteur ultrason du port 4 définir la variable Vitesse à 60 si Distance < 10 alors définir Vitesse à 0 sinon si Distance < 50 alors définir Vitesse à 30 Si la valeur du capteur de suivi de ligne est égale à 0 alors Avancer à Vitesse % puissance Si la valeur du capteur de suivi de ligne est égale à 1 alors Tourner à gauche à Vitesse % de la puissance Si la valeur du capteur de suivi de ligne est égale à 2 alors Tourner à droite à Vitesse % de la puissance Si la valeur du capteur de suivi de ligne est égale à 3 alors Reculer à Vitesse % de la puissance
|
|
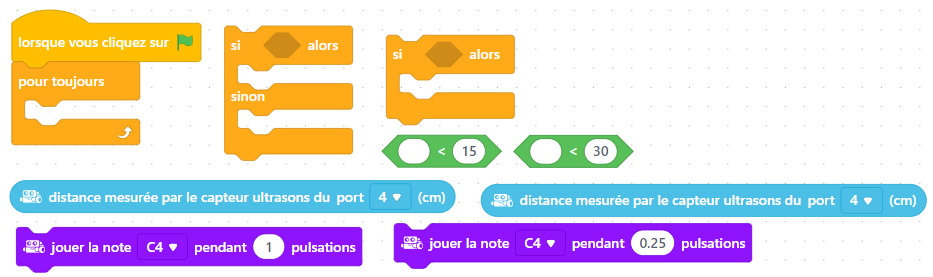
Programme n°20 : Le véhicule autonome avec alarme sonore et visuelle
La même chose que le programme 19, avec en plus une alarme sonore et visuelle lorsque le robot se rapproche dangereusement d'un obstacle.
|
Créé avec HelpNDoc Personal Edition: Éliminez les difficultés de la documentation avec un outil de création d'aide