4 - Programmes utilisant le suiveur de ligne
|
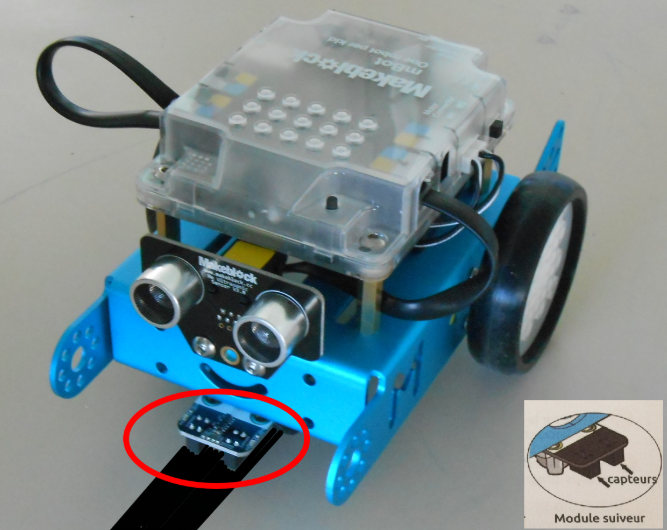
Fonctionnement du capteur de ligne Nous allons maintenant programmer le robot en utilisant les capteurs "suiveurs de ligne".
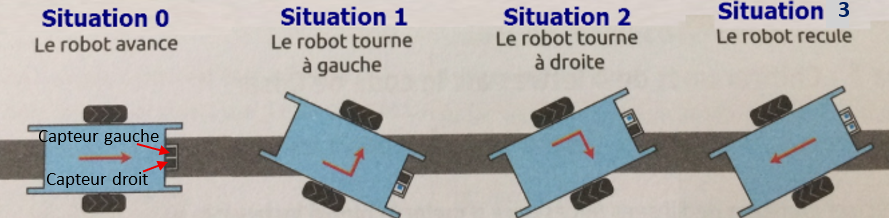
Nous allons maintenant programmer le robot en utilisant les capteurs "suiveurs de ligne". Le robot se déplace en suivant un marquage au sol (ligne noire). Pour assurer cette fonction, il dispose à l'avant d'un module suiveur de ligne, composé de deux capteurs optiques. Tant que les deux capteurs détectent la ligne, le robot avance (situation 0). Lorsqu'un des deux capteurs ne détecte plus la ligne, le robot doit tourner sur lui-même pour se remettre dans l'axe (situation 1 ou 2). Si deux capteurs sont en dehors de la ligne, le robot recule (situation 4).
|
Le robot est en mode autonome "Téléverser"
|
Rappel de la procédure à suivre pour que le robot mBot fonctionne en mode autonome Cliquez sur "Téléverser" Quand vous aurez fini d'écrire le programme, vous cliquerez sur |

Créer le document writer si cela n'est pas encore fait.
|
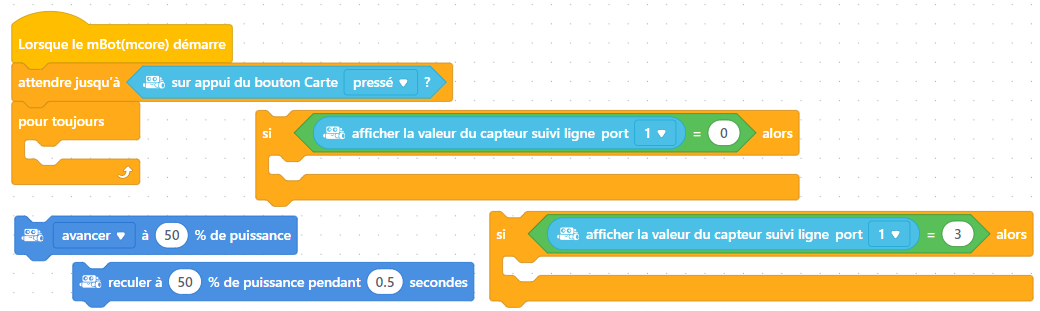
Programme n°13 : Le suiveur de ligne
|
|
|
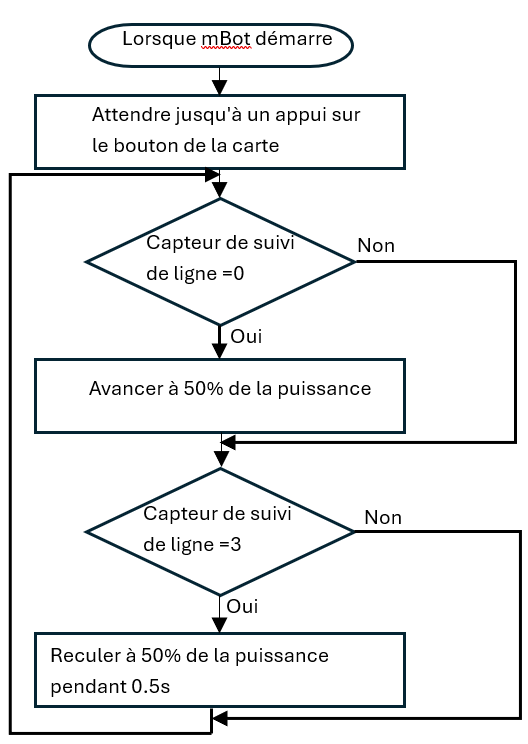
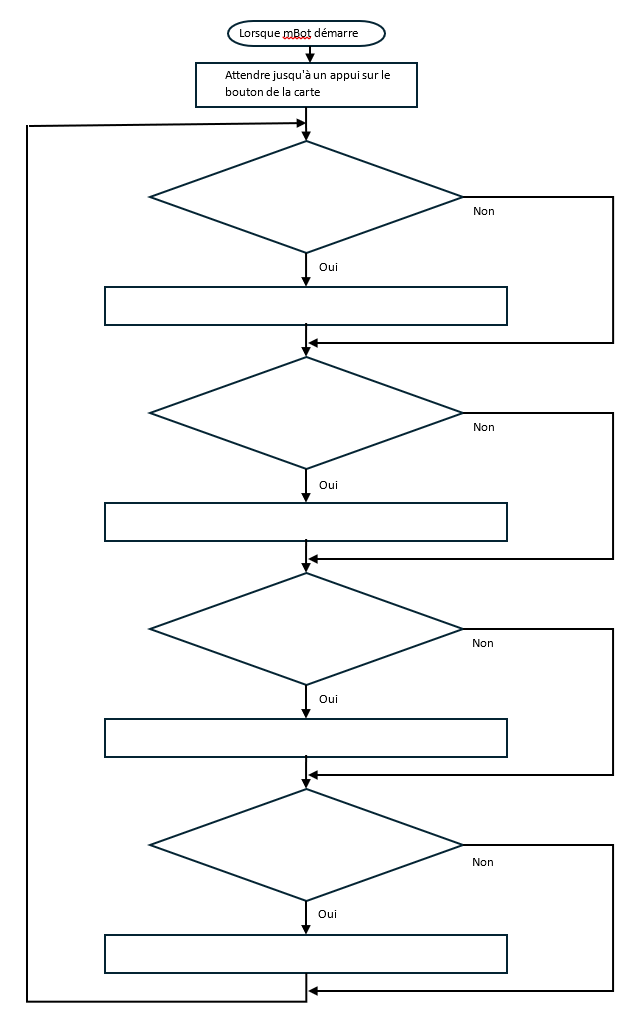
Représentation de l'algorithme en organigramme
|
Instructions à utiliser :
|
|
|
|
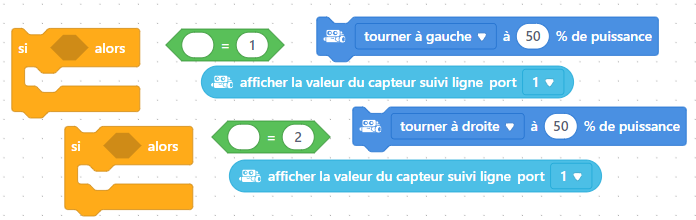
Programme n°14 : Le suiveur de ligne, suite du programme n°13
|
|
|
Représentation de l'algorithme en organigramme, à compléter sur la feuille.
|
Instructions à rajouter au programme n°13 :
|
|
|
Créé avec HelpNDoc Personal Edition: Créer des fichiers d'aide pour la plateforme Qt Help