10.2 - Suivre un objet à l'aide de la SmartCamera
|
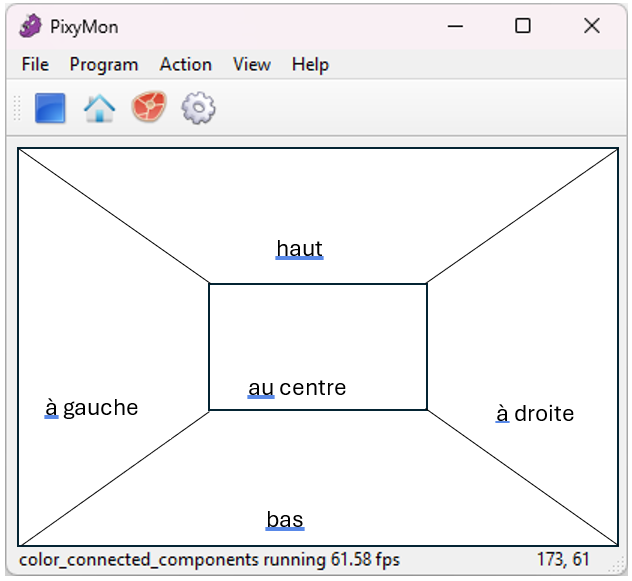
Une image renvoyée par Smart Camera peut être divisé en cinq régions. A l'aide du bloc suivant
la Smart Camera est capable de détecter la région dans laquelle se trouve l'objet coloré:
|
|

|
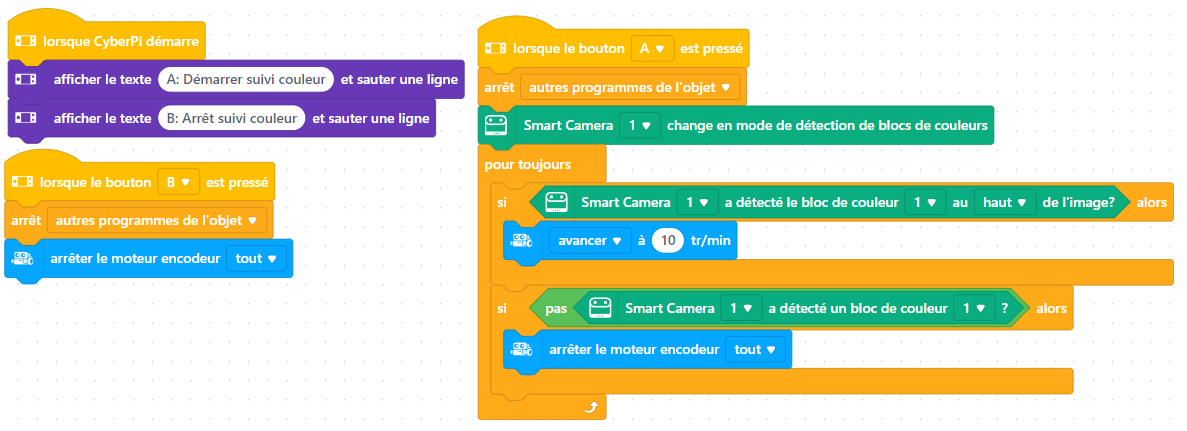
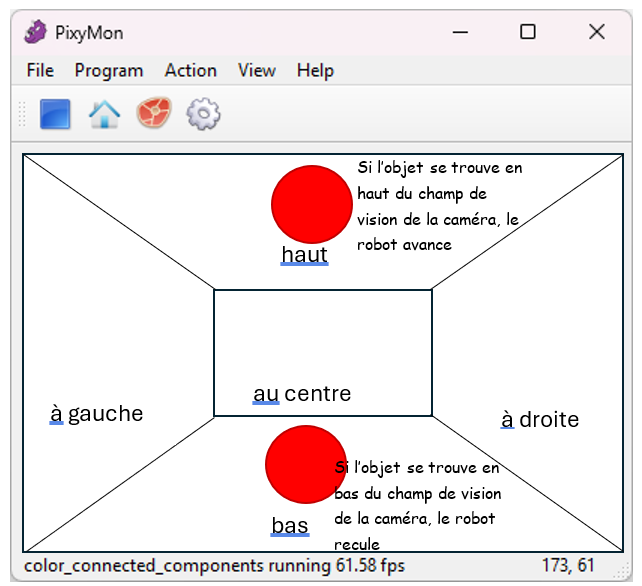
Défi 2: Le robot avance si un objet coloré se trouve dans le haut du champ de vision de la caméra, si l'objet sort du champ de vision de la caméra le robot doit s'arrêter De plus:
|
|
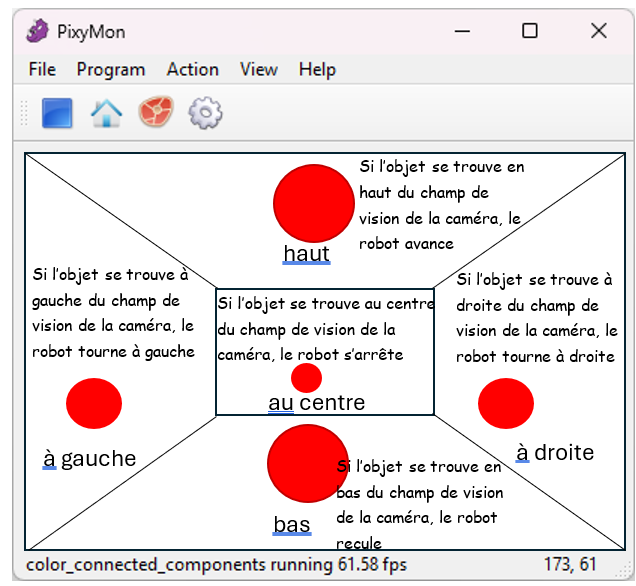
Défi 3: La même chose que le défi 2 mais en plus le robot recule lorsque l'objet se trouve dans le bas du champ de vision de la caméra.
|
Blocs à rajouter au défi 2:
|

|
Défi 4: Programme complet
|
Blocs à rajouter au défi 3:
|

Créé avec HelpNDoc Personal Edition: Créez sans effort une documentation de haute qualité avec un outil de création d'aide