Comment le robot mBot fonctionne-il?
Le robot mBot interagit avec son environnement en fonction du programme qu'on lui implante.

Pour cela, il est capable de collecter des informations grâce à ses capteurs et de réaliser des actions grâce à ses actionneurs.
Actions et actionneurs :
- le robot est capable de se déplacer : il est équipé de deux moteurs indépendants reliés
chacun à une roue (qui devient donc une roue motrice).
- il peut émettre des sons grâce à un buzzer.
- il peut émettre de la lumière grâce à 2 DEL 3 couleurs (RGB) dont la couleur est paramétrable.
Boutons et capteurs :
Pour interagir avec son environnement et y recueillir des informations, on retrouve sur le robot :
- un module Wifi qui permet de recevoir les ordres émis par l'ordinateur.
- un capteur de luminosité qui le renseigne sur la luminosité ambiante.
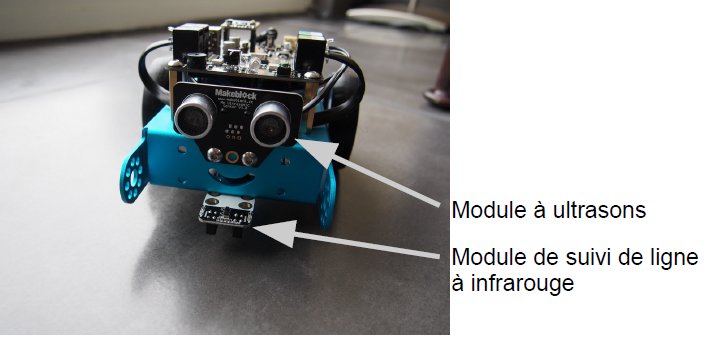
- un module à ultrasons qui lui permet de « voir » les obstacles à l'avant et d'en connaître la distance.
- un module de suivi de ligne au sol à infrarouge.
- un bouton paramétrable.
- un bouton de mise sous tension.

Créé avec HelpNDoc Personal Edition: Générateur de documentation et EPub facile